The Last Mile Problem for Robotics

The robotics industry stands at a critical inflection point.
While impressive demonstrations of robots performing complex tasks capture headlines, the reality is that most advanced robotic capabilities rely on human teleoperation rather than genuine autonomy.
The distinction between these approaches represents one of the most significant technological challenges of our era, requiring breakthroughs in both computational systems and physical hardware that push the boundaries of current engineering.
Realated Issues:



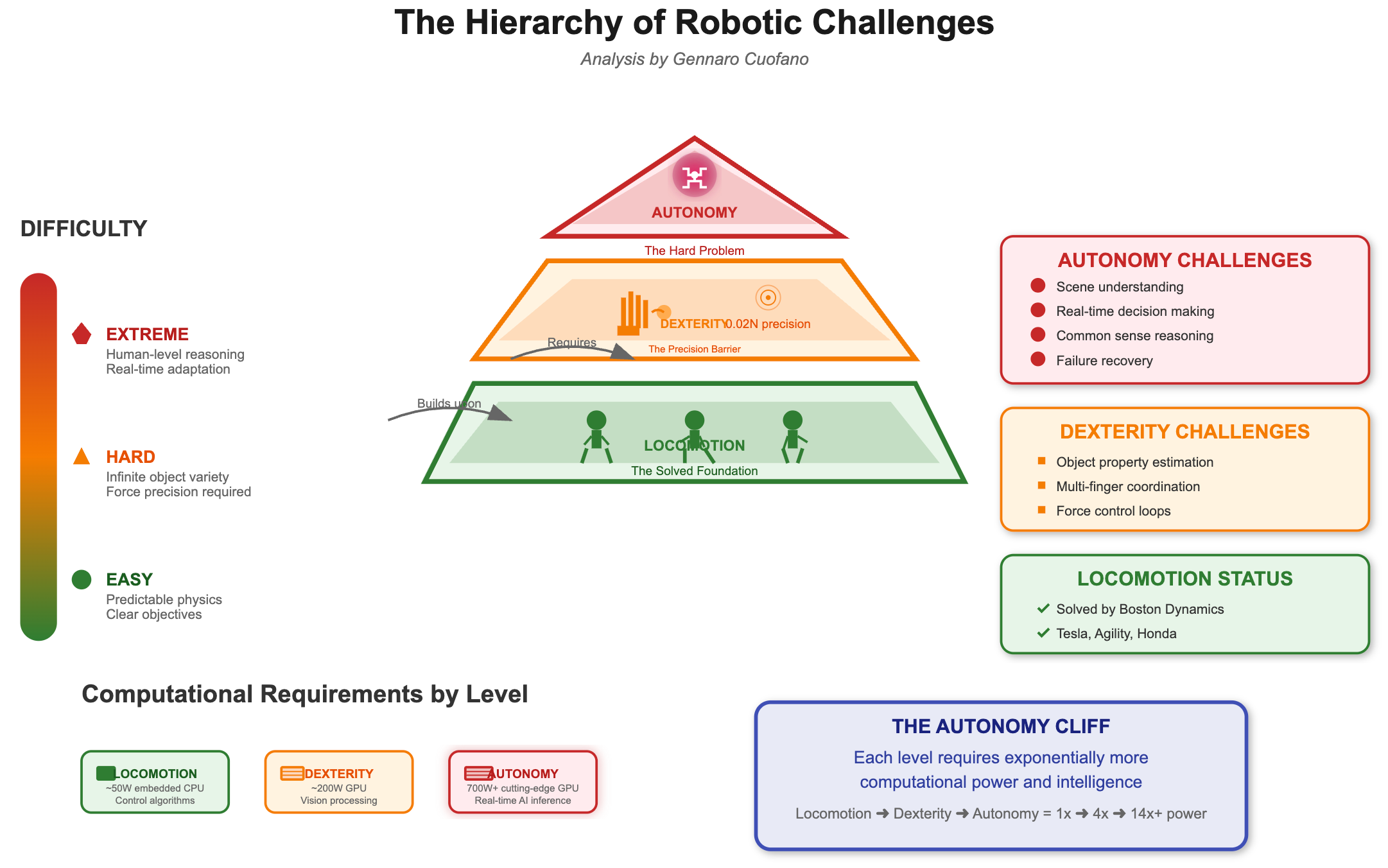
The Hierarchy of Robotic Challenges
Locomotion: The Solved Foundation
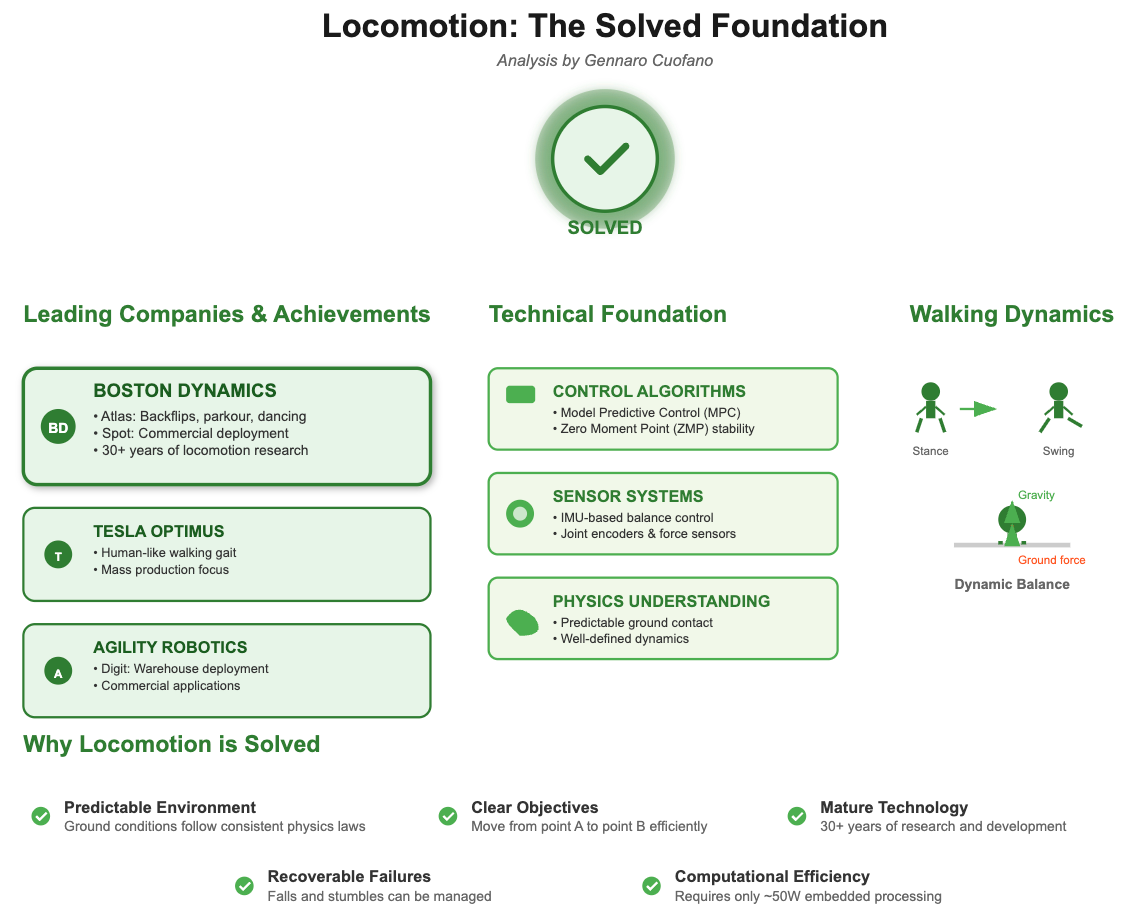
Locomotion, while visually impressive, has become the most tractable aspect of advanced robotics. Boston Dynamics' Atlas can now perform parkour, and humanoid robots from companies like Agility and Tesla demonstrate increasingly fluid walking gaits. This success stems from locomotion being fundamentally a constrained optimization problem:
The environment follows predictable physics
The objective is clear (move from point A to point B)
The control space, while complex, is well-defined
Failure modes are generally recoverable
The technological stack for locomotion is relatively mature, featuring IMU-based balance control, model predictive control algorithms, and sophisticated joint actuators that have reached a sufficient capability for most terrestrial environments.
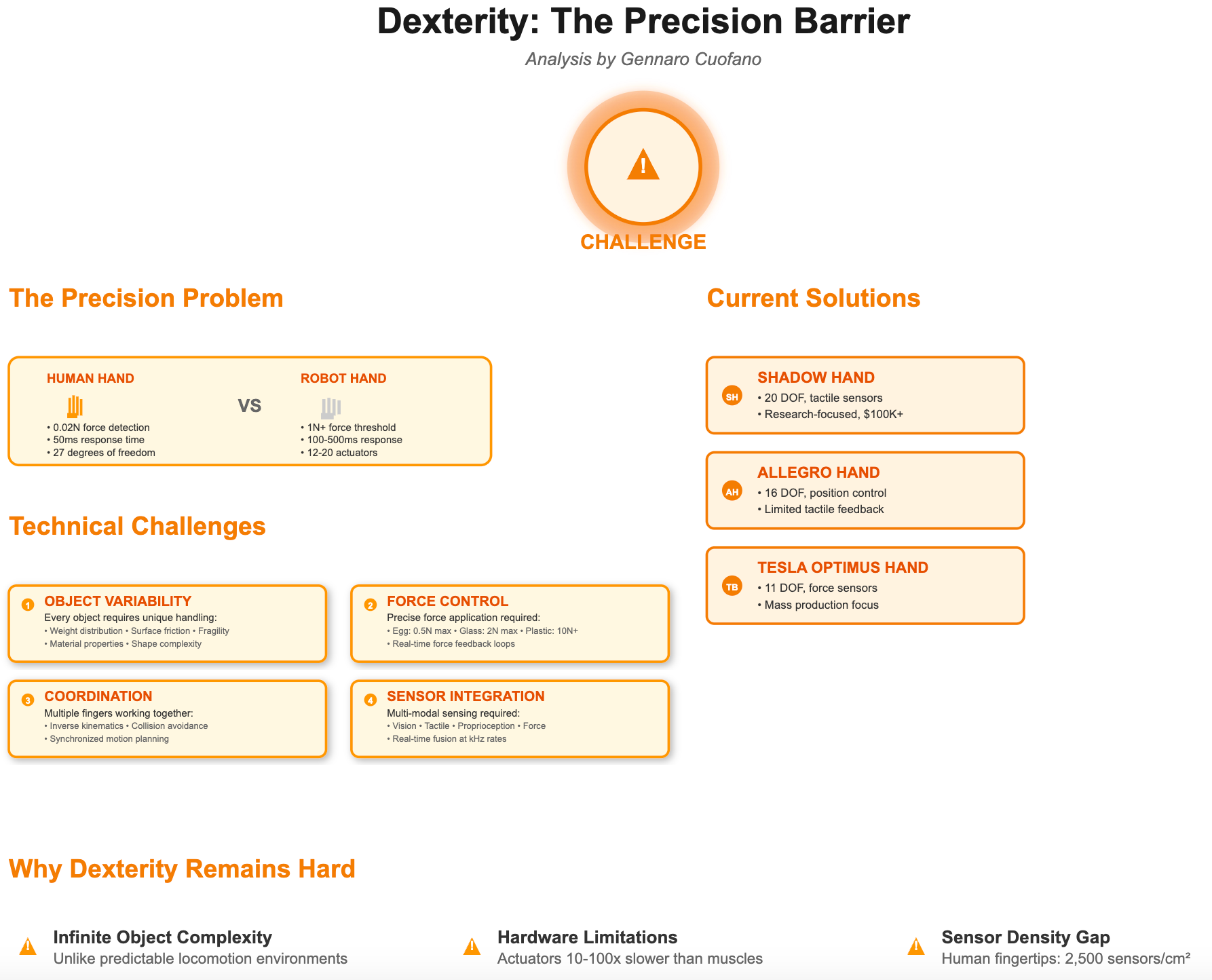
Dexterity: The Precision Barrier